import tkinter as tk
from tkinter import ttk, filedialog
from PIL import Image, ImageTk
import cv2
from ultralytics import YOLO
import csv
import os
import serial
import threading
from datetime import datetime
import serial.tools.list_ports
import time
import csv
from PIL import ImageDraw, ImageFont
# ---------------------------
# CONFIGURATION
# ---------------------------
CAMERA_INDEX = 0
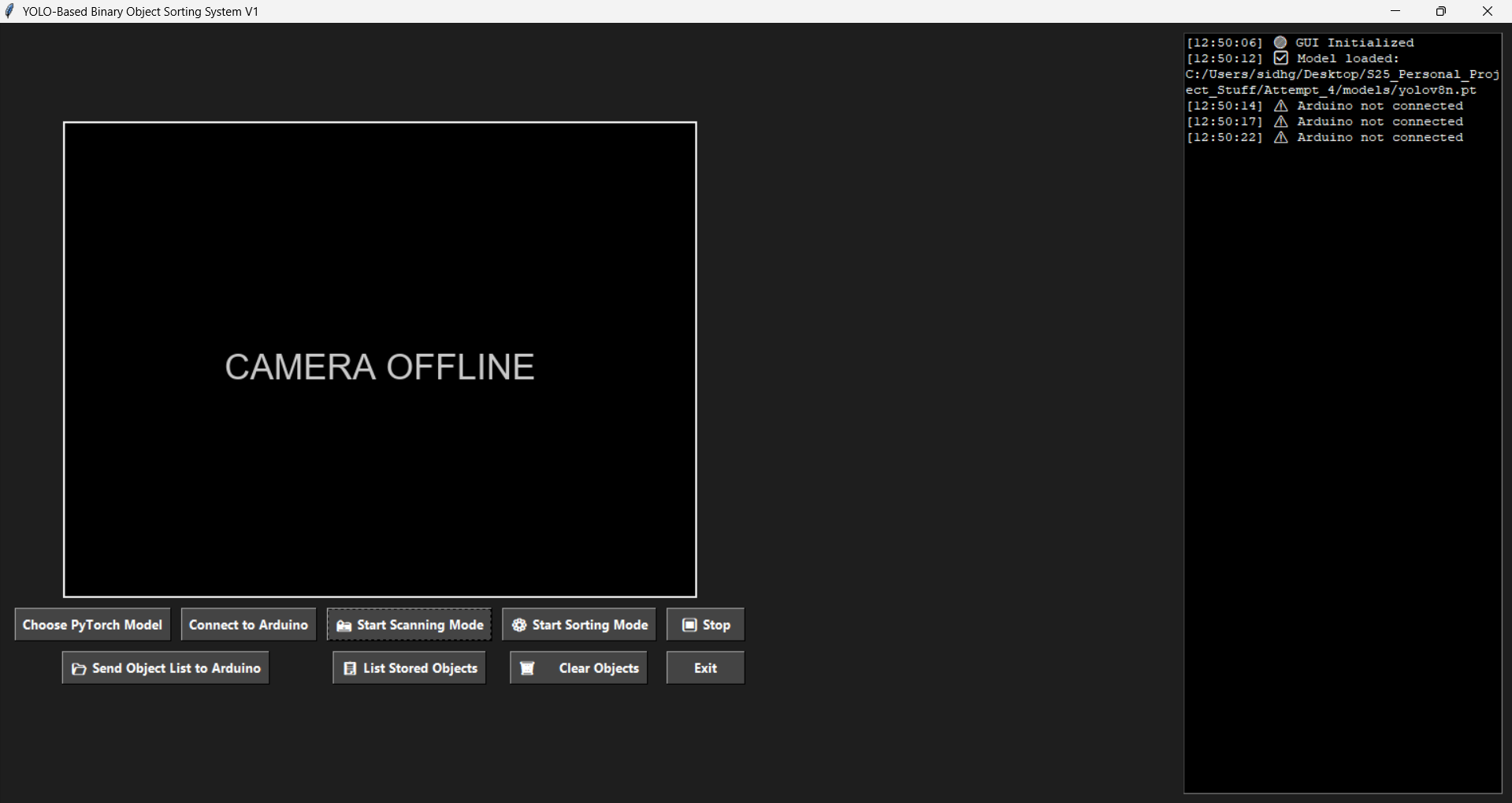
WINDOW_TITLE = "YOLO-Based Binary Object Sorting System V1"
WINDOW_BG_COLOR = "#1e1e1e"
FRAME_RATE_MS = 15
LOG_DIR = "logs"
# ---------------------------
# Ensure Logs Folder Exists
# ---------------------------
os.makedirs(LOG_DIR, exist_ok=True)
def generate_csv_name():
now = datetime.now()
return f"{LOG_DIR}/scan_log_{now.strftime('%Y-%m-%d_%H-%M-%S')}.csv"
# ---------------------------
# Connection to Arduino
# ---------------------------
def find_arduino_port():
ports = serial.tools.list_ports.comports()
for port in ports:
if "Leonardo" in port.description or (port.vid == 0x2341 and port.pid == 0x8036):
return port.device
return None
def reset_arduino_before_exit(port):
try:
ser = serial.Serial(port, 1200)
ser.close()
print("🛑 Arduino reset triggered")
time.sleep(2) # wait for Arduino to fully reset
except Exception as e:
print(f"⚠️ Could not reset Arduino: {e}")
def get_unique_classes_from_csv(path):
unique_classes = set()
try:
with open(path, newline='') as f:
reader = csv.reader(f)
for row in reader:
if len(row) >= 2:
unique_classes.add(row[1])
except Exception as e:
print(f"Error reading CSV: {e}")
return list(unique_classes)
def send_objects_to_eeprom(item_list, arduino_serial):
try:
# Create comma-separated string
object_string = ",".join(item_list[:20]) # Limit to 20 items
# Send the command
command = f"STORE_OBJECTS:{object_string}\n"
arduino_serial.write(command.encode())
print(f"✅ Sent {len(item_list)} objects to Arduino EEPROM")
return True
except Exception as e:
print(f"❌ Failed to send objects: {e}")
return False
# ---------------------------
# GUI Class
# ---------------------------
class YOLOApp:
def __init__(self, root):
self.root = root
self.root.title(WINDOW_TITLE)
self.root.configure(bg=WINDOW_BG_COLOR)
self.arduino = None
self.cap = cv2.VideoCapture(CAMERA_INDEX)
if not self.cap.isOpened():
raise RuntimeError("❌ Cannot open webcam")
self.is_running = False
self.mode = None # 'scan' or 'sort'
self.csv_file = None
self.detected_classes = set()
self.model_path = ""
self.model = None
self.arduino_ready_to_sort = False
# Layout frames
main_frame = tk.Frame(root, bg=WINDOW_BG_COLOR)
main_frame.pack(fill=tk.BOTH, expand=True)
left_frame = tk.Frame(main_frame, bg=WINDOW_BG_COLOR)
left_frame.pack(side=tk.LEFT, padx=10, pady=10)
right_frame = tk.Frame(main_frame, bg=WINDOW_BG_COLOR)
right_frame.pack(side=tk.RIGHT, padx=10, pady=10, fill=tk.Y)
# Video Frame
self.video_frame = tk.Label(left_frame)
self.video_frame.pack()
# Create a black placeholder with text "Camera Offline"
placeholder = Image.new("RGB", (640, 480), (0, 0, 0))
draw = ImageDraw.Draw(placeholder)
try:
font = ImageFont.truetype("arial.ttf", 36)
except:
font = ImageFont.load_default()
text = "CAMERA OFFLINE"
bbox = draw.textbbox((0, 0), text, font=font)
text_width = bbox[2] - bbox[0]
text_height = bbox[3] - bbox[1]
position = ((640 - text_width) // 2, (480 - text_height) // 2)
draw.text(position, text, fill=(200, 200, 200), font=font)
self.placeholder_img = ImageTk.PhotoImage(placeholder)
self.video_frame.configure(image=self.placeholder_img)
self.video_frame.imgtk = self.placeholder_img
# Control Buttons
btn_frame = tk.Frame(left_frame, bg=WINDOW_BG_COLOR)
btn_frame.pack(pady=10)
self.choose_model_btn = ttk.Button(btn_frame, text="Choose PyTorch Model", command=self.choose_model)
self.choose_model_btn.grid(row=0, column=0, padx=5)
self.arduino_btn = ttk.Button(btn_frame, text="Connect to Arduino", command=self.connect_to_arduino)
self.arduino_btn.grid(row=0, column=1, padx=5)
self.scan_btn = ttk.Button(btn_frame, text="📸 Start Scanning Mode", command=self.start_scanning_mode)
self.scan_btn.grid(row=0, column=2, padx=5)
self.sort_btn = ttk.Button(btn_frame, text="⚙️ Start Sorting Mode", command=self.start_sorting_mode)
self.sort_btn.grid(row=0, column=3, padx=5)
self.stop_btn = ttk.Button(btn_frame, text="⏹ Stop", command=self.stop_detection)
self.stop_btn.grid(row=0, column=4, padx=5)
# Second row of buttons
self.send_list_btn = ttk.Button(btn_frame, text="📂 Send Object List to Arduino", command=self.send_object_list)
self.send_list_btn.grid(row=1, column=0, columnspan=2, pady=10, padx=5)
self.list_objects_btn = ttk.Button(btn_frame, text="📋 List Stored Objects", command=self.list_stored_objects)
self.list_objects_btn.grid(row=1, column=2, padx=5)
self.clear_objects_btn = ttk.Button(btn_frame, text="🗑️ Clear Objects", command=self.clear_stored_objects)
self.clear_objects_btn.grid(row=1, column=3, padx=5)
exit_button = ttk.Button(btn_frame, text="Exit", command=self.exit_app)
exit_button.grid(row=1, column=4, padx=5)
# Output Log
self.log_text = tk.Text(right_frame, width=40, height=30, bg="black", fg="white", wrap=tk.WORD)
self.log_text.pack(fill=tk.BOTH, expand=True)
self.log("🟢 GUI Initialized")
# ---------------------------
# 🎨 Button Styling
# ---------------------------
style = ttk.Style()
style.theme_use("default")
style.configure("TButton", background="#444", foreground="white", padding=6, font=("Segoe UI", 10, "bold"))
style.map("TButton", background=[("active", "#777")])
# ---------------------------
# 🧾 Log Output
# ---------------------------
def log(self, message):
timestamp = datetime.now().strftime("[%H:%M:%S]")
self.log_text.insert(tk.END, f"{timestamp} {message}\n")
self.log_text.see(tk.END)
# ---------------------------
# 🚦 MODE SWITCHING
# ---------------------------
def start_scanning_mode(self):
if self.mode == "scan":
self.stop_detection()
return
if self.model is None:
self.log("⚠️ No model selected")
return
if self.arduino is None or not self.arduino.is_open:
self.log("⚠️ Arduino not connected")
return
self.stop_detection()
self.mode = "scan"
self.scan_btn.config(text="⏹ Stop Scanning Mode", state=tk.NORMAL)
self.sort_btn.config(state=tk.DISABLED)
self.csv_file = generate_csv_name()
self.detected_classes.clear()
self.log(f"📄 Logging to: {self.csv_file}")
self.is_running = True
self.update_frame()
def start_sorting_mode(self):
if self.mode == "sort":
self.stop_detection()
return
if self.model is None:
self.log("⚠️ No model selected")
return
if self.arduino is None or not self.arduino.is_open:
self.log("⚠️ Arduino not connected")
return
if not self.arduino_ready_to_sort:
self.log("❌ Arduino is not ready. Send object list first.")
return
self.stop_detection()
self.mode = "sort"
self.sort_btn.config(text="⏹ Stop Sorting Mode", state=tk.NORMAL)
self.scan_btn.config(state=tk.DISABLED)
self.log("⚙️ Sorting mode active")
self.is_running = True
self.update_frame()
def stop_detection(self):
self.is_running = False
was_sorting = (self.mode == "sort") # Remember if we were sorting
self.mode = None
self.video_frame.configure(image=self.placeholder_img)
self.video_frame.imgtk = self.placeholder_img
self.scan_btn.config(text="📸 Start Scanning Mode", state=tk.NORMAL)
self.sort_btn.config(text="⚙️ Start Sorting Mode", state=tk.NORMAL)
# Send stop command to Arduino
self.send_to_arduino("stop")
if was_sorting:
self.log("🛑 Detection stopped - Sorting mode disabled")
else:
self.log("🛑 Detection stopped")
def choose_model(self):
if self.is_running:
self.log("⚠️ Stop detection before loading a new model")
return
path = filedialog.askopenfilename(filetypes=[("PyTorch Model", "*.pt")])
if path:
self.model_path = path
self.model = YOLO(self.model_path)
self.log(f"✅ Model loaded: {self.model_path}")
# ---------------------------
# Frame Processing
# ---------------------------
def update_frame(self):
if not self.is_running:
return
ret, frame = self.cap.read()
if not ret:
self.log("❌ Failed to grab frame - stopping detection")
self.stop_detection() # Auto-stop if camera fails
return
results = self.model(frame)[0]
annotated = results.plot()
if self.mode == "scan":
self.handle_scanning_mode(results)
elif self.mode == "sort":
self.handle_sorting_mode(results)
rgb_frame = cv2.cvtColor(annotated, cv2.COLOR_BGR2RGB)
img = Image.fromarray(rgb_frame)
imgtk = ImageTk.PhotoImage(image=img)
self.video_frame.imgtk = imgtk
self.video_frame.configure(image=imgtk)
self.root.after(FRAME_RATE_MS, self.update_frame)
# ---------------------------
# Scanning Mode Logic
# ---------------------------
def handle_scanning_mode(self, results):
self.send_to_arduino("scan")
for box in results.boxes:
cls_id = int(box.cls[0])
class_name = self.model.names[cls_id]
if class_name not in self.detected_classes:
self.detected_classes.add(class_name)
with open(self.csv_file, 'a', newline='') as f:
writer = csv.writer(f)
writer.writerow([datetime.now().isoformat(), class_name])
self.log(f"📝 Logged: {class_name}")
# ---------------------------
# Sorting Mode Logic
# ---------------------------
def handle_sorting_mode(self, results):
self.send_to_arduino("sort")
for box in results.boxes:
cls_id = int(box.cls[0])
class_name = self.model.names[cls_id]
self.log(f"📦 Detected for sorting: {class_name}")
# Send the detected class to Arduino
self.send_to_arduino(class_name)
break
# ---------------------------
# Arduino Communication
# ---------------------------
def connect_to_arduino(self):
port = find_arduino_port()
if port:
try:
self.arduino = serial.Serial(port, 9600, timeout=2)
self.log(f"🟡 Connecting to Arduino on {port}...")
time.sleep(2) # Allow time for Arduino to reset and send handshake
# Wait for "READY"
start_time = time.time()
ready_line = ""
while time.time() - start_time < 5:
if self.arduino.in_waiting > 0:
ready_line = self.arduino.readline().decode().strip()
if ready_line == "READY":
break
elif ready_line: # Any other message from Arduino
self.log(f"Arduino: {ready_line}")
if ready_line == "READY":
self.log("✅ Arduino is ready!")
self.arduino_btn.config(text="Arduino Connected!", state=tk.DISABLED)
# Start listening thread for Arduino messages
self.start_arduino_listener()
else:
self.log(f"❌ Unexpected handshake message: {ready_line}")
except serial.SerialException as e:
self.log(f"❌ Connection Failed: {str(e)}")
else:
self.log("⚠️ No Arduino found!")
def start_arduino_listener(self):
"""Start a background thread to listen for Arduino messages"""
def listen():
while self.arduino and self.arduino.is_open:
try:
if self.arduino.in_waiting > 0:
message = self.arduino.readline().decode().strip()
if message:
if message == "READY_TO_SORT":
self.arduino_ready_to_sort = True
self.log("🟢 Arduino ready to sort!")
else:
self.log(f"Arduino: {message}")
time.sleep(0.1)
except Exception as e:
if self.arduino and self.arduino.is_open:
self.log(f"Error reading from Arduino: {e}")
break
listener_thread = threading.Thread(target=listen, daemon=True)
listener_thread.start()
def send_to_arduino(self, message):
try:
if self.arduino and self.arduino.is_open:
self.arduino.write((message + "\n").encode())
except Exception as e:
self.log(f"❌ Error sending to Arduino: {e}")
def send_object_list(self):
"""Send object list to Arduino EEPROM"""
if self.arduino is None or not self.arduino.is_open:
self.log("⚠️ Arduino must be connected before sending list")
return
filepath = filedialog.askopenfilename(filetypes=[("CSV Files", "*.csv")])
if not filepath:
self.log("⚠️ No file selected")
return
classes = get_unique_classes_from_csv(filepath)
if not classes:
self.log("⚠️ No valid objects found in CSV")
return
self.log(f"📤 Sending {len(classes)} objects to Arduino EEPROM...")
if send_objects_to_eeprom(classes, self.arduino):
self.log(f"✅ Sent {len(classes)} objects: {', '.join(classes)}")
else:
self.log("❌ Send failed")
def list_stored_objects(self):
"""Ask Arduino to list stored objects"""
if self.arduino and self.arduino.is_open:
self.send_to_arduino("LIST_OBJECTS")
else:
self.log("⚠️ Arduino not connected")
def clear_stored_objects(self):
"""Clear objects from Arduino EEPROM"""
if self.arduino and self.arduino.is_open:
self.send_to_arduino("CLEAR_OBJECTS")
self.arduino_ready_to_sort = False
self.log("🗑️ Cleared stored objects")
else:
self.log("⚠️ Arduino not connected")
def exit_app(self):
if self.arduino and self.arduino.is_open:
port = self.arduino.port
self.arduino.close()
self.clear_stored_objects()
reset_arduino_before_exit(port)
self.root.destroy()
# ---------------------------
# Run GUI
# ---------------------------
if __name__ == "__main__":
root = tk.Tk()
app = YOLOApp(root)
root.mainloop()
if app.cap.isOpened():
app.cap.release()
cv2.destroyAllWindows()